Главная
>
Продукты > Модуль лазерного дальномера > Модуль лазерного дальномера 905 нм > Модуль мини -лазерного дальномеров 1200 м (LRF)
Продукты
новые продукты
 Тепловизионная камера с объективом 640x512 и диаметром 45 мм для FPV-дрона
Тепловизионная камера с объективом 640x512 и диаметром 45 мм для FPV-дрона Тепловизионная камера с объективом 640x512 и диаметром 24 мм для FPV-дрона
Тепловизионная камера с объективом 640x512 и диаметром 24 мм для FPV-дрона Тепловизионная камера с объективом 640x512 и диаметром 13 мм для FPV-дрона
Тепловизионная камера с объективом 640x512 и диаметром 13 мм для FPV-дрона Тепловизионная камера с объективом 640x512 и диаметром 9,1 мм для FPV-дрона
Тепловизионная камера с объективом 640x512 и диаметром 9,1 мм для FPV-дрона- Все новые продукты
")

Модуль мини -лазерного дальномеров 1200 м (LRF)
Миниатюрный модуль лазерного дальномеров серии STA-M применяет 905 нм полупроводниковые лазерные компоненты, с низким энергопотреблением, небольшими размерами, стабильными характеристиками и другими характеристиками, подходящими для тепловой визуализации, ночного видения и других портативных мобильных устройств и миниатюрного интегрирования оборудования для БПЛ.
Диапазон измерений: 5-1200meters
Измерение деревьев ≥1000 метров
Точность измерения ± 1 м
Вес ≤14 ± 0,5 г
Отправить запрос
Описание продукта
Технические параметры показаны в следующей таблице
| Модель | STA-M010X | |
| Лазерная длина волны | 905 нм | |
| Возможность RANGING | Здание | 1200 м |
| Деревья | 1000м | |
| Лазерный класс | Безопасность глаз 1 класса | |
| Мини -диапазон | 5 м | |
| Разрешение | ± 0,1 м | |
| Эксплуатационный ток | ≤90 мА | |
| Резервный ток | ≤20 мА | |
| Энергопотребление | STANDBY≤0.09W | |
| Пик ≤0,23 Вт | ||
| Интерфейс связи | Ттл | |
| Рабочая температура | · -20 ℃ ~+55 ℃ | |
| Температура хранения | · -30 ℃ ~+60 ℃ | |
| Входное напряжение | 3-5 В (рекомендуется питание 5 В) | |
| Угол дивергенции луча | 5 болезней | |
| Частота диапазона | 1-3 Гц | |
| Власть | ≤1 МВт безопасно для человеческих глаз | |
| Метод дальности | Пульс | |
| Масса | 14 ± 0,5 г | |
| Размер | Φ23x47 мм | |
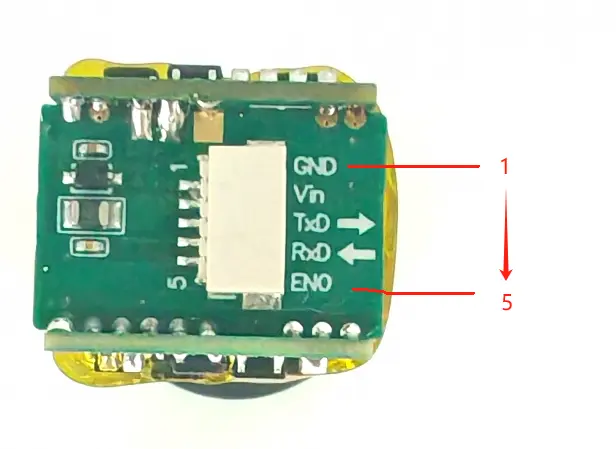
Интерфейсы и булавки определены, как показано в следующей таблице
| TTL интерфейс | |||
| Приколоть | Определение вывода | Описывать | Схематический рисунок |
| 1 | Гнездо | Источник питания - |
|
| 2 | Вин | Питания + | |
| 3 | Txd | Передавать данные | |
| 4 | Rxd | Получили данные | |
| 5 | Эно | Включить PIN -код, зарезервированный | |
|
|
|
|
|
Диаграмма команд модуля
| Master Command | ||
| Код команды | Описание | Вещание добавить. ответ |
| 0x80 | Читать статус дальнодорогого числа | НЕТ |
| 0x81 | Читать результат измерения | НЕТ |
| 0x83 | Начать | НЕТ |
| 0x84 | Остановиться | НЕТ |
| 0x9e | Программа коммуникации | ДА |
| 0xbe | Прочитайте параметр связи | ДА |
| 0xc0 | Коммуникационный тест | ДА |
| 0xc1 | Прочитайте версию прошивки | ДА |
|
|
|
|
| Рабский ответ | ||
| Код распознавания | Описание | |
| 0x60 | Простой кадр ответа | |
| 0x01 | Рамка данных диапазона | |
| 0x20 | Рамка статуса дальности | |
| 0x21 | Кадр параметра связи | |
| 0xe0 | Кадр сообщения об ошибке | |
ПРИМЕЧАНИЕ
1. Формат кадра связи:
Slaveid + инструкция + параметр + контрольная сумма
2. Интервал между двумя соседними кадрами должен быть не менее 1,5 байта, когда
отправлено, когда это менее 1 мс, он рассматривается как 1 мс;
600bps: 25 мс
1200bps: 12,5 мс
2400bps: 6,25 мс
4800bps: 3,125 мс
9600bps: 1,56 мс
19200bps: 1 мс (0,78 мс <1 мс, взять 1 мс)
3. Отправка расчета контрольной суммы;
Этот модуль использует режим проверки байта по сумме накопления байта, Slabid не является
Включено в проверку, наконец отправить контрольную сумму.
Такие как рассчитайте проверку суммы режима сканирования инструкции "0x83 0x40":
A.calculate Сумма накопления: 0x83 + 0x40 = 0xc3;
B.Take LSB [D7..D0]: 0xC3;
C.calculate 2 комплемент: 0x100 - 0xc3 = 0x3d, 0x3d - контрольная сумма;
Добавить подчиненный адрес, когда Mater отправляет: 0x10 0x83 0x40 0x3d
4. Проверка квитанция;
Такие как приема связи: 0x10 0x83 0x40 0x3d, проверка не включает в себя
Адрес раба 0x10
A.calculate Сумма накопления: 0x83 + 0x40 + 0x3d = 0x100;
B.take LSB суммы накопления: 0x00; 0x00 является результатом проверки;
Если результат проверки составляет 0x00, это означает, что полученные данные являются правильными; Если результат проверки
не 0x00, это означает, что полученные данные неверны.
Описание команды модуля
Примечание. В примере подчиненный адрес каждой команды составляет 0x10; в приложении подчиненный адрес будет запрограммирован.
1 、 Тест связи (0xc0) ; ;
| Мастер отправляет | ||
| Код команды | Параметр | Описание |
| 0xc0 | Никто |
|
| Рабские ответы | ||
| Код распознавания | Параметр | Описание |
| 0x60 | Никто |
|
| Пример | ||
| Мастер отправляет: 0x10 0xc0 0x40; 0x40 - контрольная сумма Ответ раба: 0x10 0x60 0xa0; 0xa0 - проверка |
||
2 、 командование рабом зачнется (0x83) ;
| Мастер отправляет | ||
| Код команды | Параметр | Описание |
| 0x83 | byte1 | D7: Reserve |
| D6: режим непрерывного рейтинга, 0 = выключен; 1 = на; | ||
| D5: FOG -режим, 0 = OFF; 1 = на; | ||
| D4: Блок данных, 0 = метр; 1 = двор; | ||
| D3 - D0: Рабочий режим, 0 = Ranging; 1 = скорость; 2 = небольшой целевой режим; | ||
| Рабские ответы | ||
| Код распознавания | Параметр | Описание |
| 0x60 | Никто | Если Slave установлен как автоматический режим экспорта, Slave отвечает 0x60 сначала после приема команды начала, после завершения рейтинга, он затем отправит результат промежутки времени; |
| Пример | ||
| Мастер отправляет: 0x10 0x83 0x00 0x7d: режим 0 предназначен для одной меры, блок данных - счетчик; 0x10 0x83 0x40 0x3d: режим 0 предназначен для непрерывного меза, блок данных - счетчик; 0x10 0x83 0x10 0x6d: режим 0 предназначен для одной меры, блок данных - двор; 0x10 0x83 0x20 0x2d: режим 0 предназначен для непрерывного меза, блок данных - двор; Ответ раба: 0x10 0x60 0xa0; |
||
Примечание:1 、 Если метод экспорта данных модуля устанавливается как режим запроса, то он может сделать только отдельную меру;
2. В режиме скорости непрерывная функция батареи является нулевой, что не является непрерывной скоростью;
3. Фог режим действителен только для устройства с функцией режима тумана;
4. Slave отправит кадр ответа 0x60 после приема команды начала, он начнет отправлять результат дальности после завершения рейтинга.
3 、 командование рабом остановки (0x84) ;
| Мастер отправляет | ||
| Код команды | Параметр | Описание |
| 0x84 | Никто |
|
ПРИМЕЧАНИЕ. После того, как Master отправляет команду в раб, чтобы выполнить непрерывное бюро, она должна отправить эту команду в раб, чтобы остановиться. Если Master отправляет команду рабом, чтобы выполнить однократное время, то не нужно отправлять эту команду, потому что раб остановится автоматически после завершения рейтинга.
4 、 Чтение статуса рабов (0x80) ;
| Мастер отправляет | ||
| Код команды | Параметр | Описание |
| 0x80 | Никто |
|
| Рабские ответы | ||
| Код распознавания | Параметр | Описание |
| 0x20 | byte1 | D7: 1 = дальномер занят; 0 = ranging закончен; D6: 1 = неисправность дальнодорогого числа; 0 = нет неисправности; D5-D2: резерв; D1: 0 = угловой датчик запрещен; 1 = угловой чувствительность включено; D0: 0 = датчик угла нормальный; 1 = ненормальный датчик угла; |
| byte2 | Бронировать | |
5 、 Результат поиска диапазона чтения (0x81) ;
| Мастер отправляет | |
| Описание |
|
|
|
|
| Рабские ответы | |
| Описание |
|
| D7 :: Данные расстояния, 0 = Данные действительны; 1 = неверные данные; D6 :: angle data, 0 = Данные действительны; 1 = неверные данные; D5: разрешение данных, 0 = 0,5/LSB; 1 = 0,1/LSB; D4: Блок данных, 0 = метр; 1 = двор; D3 - D0: Рабочий режим, 0 = Ranging; 1 = скорость; |
|
| Когда расстояние действителен: расстояние [d15..d8]; Когда расстояние является недействительным: 0x80 = в диапазоне без результата; 0x81 = системная ошибка; |
|
| Когда угол действителен: расстояние [d7..d0]; Когда угол недействителен: резерв; |
|
|
|
|
| Пример | |
| 1 、 раб отправляет кадр расстояния: 0x10 0x01 0x60 0x12 0xd7 0xb6 Значение расстояния = 0x12d7 = 4823 = 482,3 м 2 、 раб отправляет скорость кадра: 0x10 0x01 0x21 0x03 0xd7 0x04 Значение скорости = 0x03d7 = 983 = 98,3 км/ч 3 、 раб отправляет кадр расстояния: 0x10 0x01 0xe0 0x80 0x00 0x9f Значение расстояния неверно (первый байт равен 0xe0, d7 = 1) |
|
6 、 Напишите Скорость передачи передачи коммуникаций (0x9e), заводская настройка - 19200bps ; ;
| Мастер отправляет | ||
| Код команды | Параметр | Описание |
| 0x9e | byte1 | должен быть 0x90 |
| byte2 | Бронировать | |
| Byte3 | Бронировать | |
| Byte4 | Настройка скорости бодского бод: 0 = 1200bps; 1 = 2400BPS; 2 = 4800bps; 3 = 9600bps; 4 = 19200bps (по умолчанию); |
|
| Рабские ответы | ||
| Код распознавания | Параметр | Описание |
| (, Пожалуйста, обратитесь к рабской реакции, часть чтения параметра рабов) | ||
| Пример | ||
| Если Master отправляет кадр: 0x10 0x9e 0x90 0x00 0x00 0x04 0xce; Это означает: Установите скорость передачи рабов в 19200 г. | ||
Примечание. Новая скорость передачи данных действителен только после перезапуска модуля;
7 、 Напишите подчиненный адрес (0x9e), настройки заводских: 0x10 ;
| Мастер отправляет | ||
| Код команды | Параметр | Описание |
| 0x9e | byte1 | Должен быть 0x91 |
| byte2 | Бронировать | |
| Byte3 | Бронировать | |
| Byte4 | раб новый адрес; | |
| Рабские ответы | ||
| Код распознавания | Параметр | Описание |
| (, Пожалуйста, обратитесь к рабской реакции, часть чтения параметра рабов) | ||
| Пример | ||
| Чтобы написать подчиненный адрес как 0x20, затем Master отправляет: 0x10 0x9e 0x91 0x00 0x00 0x20 0xb1 | ||
Примечание:1. Новый подчиненный адрес действителен после перезапуска устройства
2. 0x00 - это трансляционный адрес, поэтому подчиненный адрес не может быть установлен как 0x00;
3. Подчиненный адрес по умолчанию составляет 0x10;
8 、 Измеренный метод экспорта результатов (0x9e) ;
| Мастер отправляет | ||
| Код команды | Параметр | Описание |
| 0x9e | byte1 | Должен быть 0x92 |
| byte2 | Бронировать | |
| Byte3 | Бронировать | |
| Byte4 | Измеренный метод экспорта результатов Selectiong: 0 = режим запроса (подчиненный может экспортировать данные только при отправке Master Perief Thoman) 1 (по умолчанию) = Автоматический режим (после завершения, он автоматически отправляет данные); |
|
| Рабские ответы | ||
| Код распознавания | Параметр | Описание |
| (, Пожалуйста, обратитесь к рабской реакции, часть чтения параметра рабов) | ||
| Пример | ||
| Чтобы изменить экспорт данных на автоматический экспорт, затем Master отправляет: 0x10 0x9e 0x92 0x00 0x00 0x01 0xcf | ||
9 、 Установите напряжение UART IO (0x9e), настройка фабрики: 3,3 В ;
| Пример | ||
| Код команды | Параметр | Описание |
| 0x9e | byte1 | Должен быть 0x93 |
| byte2 | Бронировать | |
| Byte3 | Бронировать | |
| Byte4 | UART IO Настройка напряжения: 72 - 199, 0,025 В/LSB; | |
| Рабские ответы | ||
| Код распознавания | Параметр | Описание |
| (, Пожалуйста, обратитесь к рабской реакции, часть чтения параметра рабов) | ||
| Пример | ||
| Измените напряжение UART IO на 3,3 В, затем мастер отправляет: 0x10 0x9e 0x93 0x00 0x00 0x84 0x4b | ||
Примечание : VIO = настройка * 0,025V, по умолчанию VIO = 3,3 В
10 、 Параметр передачи связи (0xbe) ;
| Мастер отправляет | ||
| Код команды | Параметр | Описание |
| 0xbe | byte1 | Должен быть 0x91 или 0x92 |
| Рабские ответы | ||
| Код распознавания | Параметр | Описание |
| 0x21 | byte1 | Адрес рабства: 0x01 - 0xff |
| byte2 | D4: Метод экспорта данных; D3 - D0: настройка скорости передачи данных; |
|
| Byte3 | Uart io настройка напряжения | |
11 、 раб отправляет неправильную информацию (0xe0) ; ;
| Рабские ответы | ||
| Код распознавания | Параметр |
|
| 0xe0 | byte1 | D7 - D3: резерв; D2: 1 = ошибка параметра связи; D1: 1 = неузнаваемая коммерция; D0: 1 = ошибка контрольной суммы; |
12 、 Читать версию прошивки (эта команда была поддержана только в V7.00 или более новой версии;) ;
| Мастер отправляет | ||
| Код команды | Параметр |
|
| 0xc1 | Никто |
|
| Рабские ответы | ||
| Код распознавания | Параметр | Примечания |
| 0x61 | byte0 | Май версия (BCD) |
| byte1 | Незначительная версия (BCD) | |
| Пример | ||
| Отклики раба: 0x10 0x61 0x07 0x00 0x98 Данные "0x07 0x00" означает версию прошивки v7.00. |
||
Горячие Теги: Модуль мини -лазерного дальномеров 1200 м (LRF), производители, поставщики, фабрика, Китай, сделанные в Китае, индивидуальное, высокое качество
Связанная категория
Модуль лазерного дальномера 905 нм
Модуль лазерного дальномера 1535 нм
Модуль лазерного дальномера 1570 нм
1,54 мкл модуль лазерного дальномеров
1064 -нм лазерный целевой обозначение
Модуль Anti Drone STSTEM
Модуль дальнего лидара
Отправить запрос
Пожалуйста, не стесняйтесь дать свой запрос в форме ниже. Мы ответим вам в течение 24 часов.





")